0 引 言
在中国水资源匮乏的情况下,农业灌溉用水消耗了全国供水量的60%左右,且灌溉水利用率仅为43%,因此,必须从根本上解决农业用水过度浪费的问题[1-2]。黑龙江省是中国生产水稻的大省,但也是一个水资源总量偏少的省份。近年来,黑龙江省进入了新的干旱周期,灌溉用水短缺问题日益严重,出现了因干旱而导致的水稻减产[3]。
多年来,农业专家致力于自动节水灌溉制度的研究,在许多地区推广使用了各种节水灌溉技术[4]。在国外,节水灌溉控制制度发展起步早,自动化程度高,已经形成了完善的灌溉控制体系,近年来相关研究已经深入到将气象因素、蒸腾量和土壤含水率相结合的综合灌溉控制。国内在这方面的研究起步较晚,技术落后,自动化程度不高,距国外的先进水平还有很大的差距。国内使用的大部分灌溉控制器是工作在定时方式下,依靠工作人员的灌溉经验设定灌溉时间,这种灌溉方式不能达到精确的目的。并且由于寒地水稻的特殊生长环境,常规的灌溉控制很难达到节水目的,必须结合寒地水稻各生育期的需水量进行调亏灌溉。农业领域中对中国东北地区水稻灌溉的研究少之又少,因而,针对寒地水稻的节水灌溉制度研究有待进一步提高[5]。
灰色理论模型[6-7]是对已有少量的不确定性数据进行灰色生成、处理,进而挖掘出输入数据和输出数据之间的非线性的复杂规律。灌溉用水的损耗主要受气候环境影响,使灌溉具有很大的滞后性[8],灰色理论根据当前灌溉制度影响因子预测出未来的影响参数,以制定更优灌溉策略。神经网络是一种非线性系统的辨识工具,具有结构简单、可操作性强等优点,并具有较好的收敛性、实时性和一定的泛化能力,适用于预测控制[9-11]。以一阶N维灰色动态模型GM(1,N)的响应构建神经网络的拓扑结构,提高影响因子预测的精确度。灌溉控制是一个非线性、时滞性的过程,常规控制难以建立精确的控制模型[12],模糊控制以人的经验和知识为依据,模仿人的思维方式对复杂系统进行控制决策,不需要建立精确的数学模型[13-14]。兹考虑寒地水稻各生育期需水量及影响节水灌溉的气候因子,提出基于灰色神经预测网络与模糊控制的智能灌溉制度,以当前及灰色神经网络预测的环境参数、作物灌溉水量为决策依据,将预测灌溉需水量与作物最佳灌溉需水量相比,二者的差值及差值变化率作为模糊控制器的输入,灌溉时间作为输出,以此设定灌溉阀门的开启时间。
1 材料与方法
1.1 系统组成及原理
智能灌溉制度主要由灰色神经网络预测模块和模糊灌溉控制模块组成。预测模块根据历史及当前灌水量、环境参数(温度、土壤湿度、稻田蒸发蒸腾量、风速等),预测出未来参数,据此推断出未来所需灌水量,解决灌溉制度影响因子的不确定性及时滞性,为适时适量灌溉提供决策依据。模糊灌溉控制根据农业专家知识及灌溉经验,不需要建立精确数学模型,进行灌溉自动控制。灰色神经网络预测模块预测出的未来灌溉水量与设定的作物最佳灌溉水量的差值(e)及差值变化率(ec)作为模糊控制器的输入,推理出灌溉时间(u),驱动灌溉阀门开关,进行适时适量灌溉。智能灌溉原理如图1所示。

图1 灌溉策略原理
1.2 微型气象站设计
微型气象站主要采集水稻种植环境的气象数据(风速、风向、温度、土壤湿度等),将采集数据初步处理后传送给中央处理器进行存储和分析并做出灌溉决策。随着通信技术、传感器技术的发展,本研究依托ZigBee技术建立无线传感器网络采集各项数据[15-16],把采集的数据通过GPRS网络传输到监控中心,具体工作框图如图2所示。微型气象站信息采集系统主要由传感器、处理器、无线通信模块和电源等组成,实物结构如图3所示。
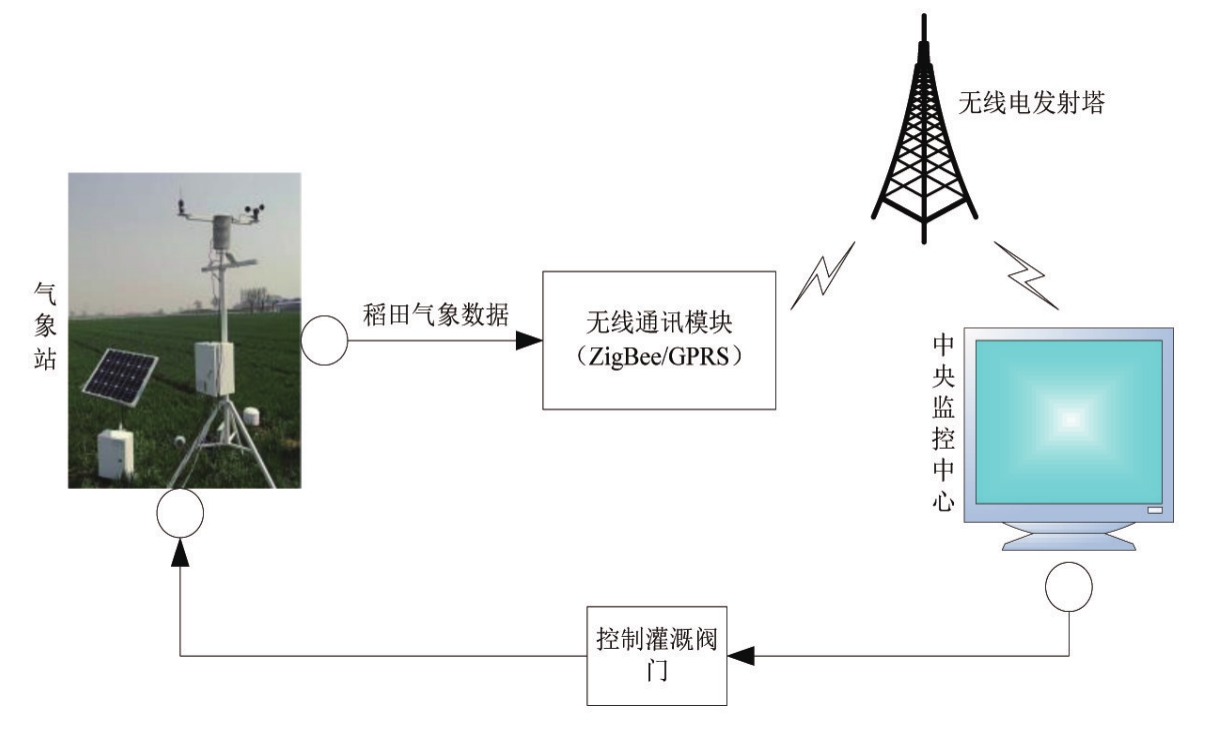
图2 气象信息采集系统结构
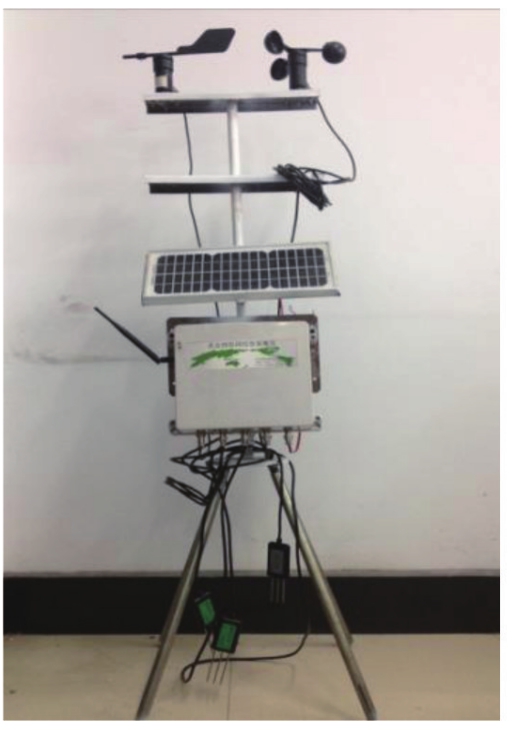
图3 微型气象站实物
为节约布线成本和提高控制效率,将灌溉电磁阀与微型气象站连在一起,缩短了灌溉操作时间。处理器作为微型气象站终端控制单元直接与传感器、电磁阀和无线通信模块相连,完成数据采集与灌溉操作。本系统选用意法半导体推出的STM32系列单片机为处理器,内部嵌有128KB的Flash程序存储空间,具有充足的外部设备接口电路和GPIO口,ADC精度为12位,非常适用于快速采集数据和处理数据[17-18]。在ZigBee无线传感器网络中,设置一个ZigBee节点为网络的协调器,其他节点为ZigBee终端设备[18-20],其协调器的ZigBee模块与GPRS模块通过串口直接相连,完成数据的远程传输,实现远程监测与控制。
1.3 蒸散量的估算
灌溉自动控制的非线性以及稻田环境参数的不断变化,增加了灌水量管理的难度。黑龙江省位于北纬43°25′―53°33′,冬季严寒漫长,夏季较短且温度较低,无霜期90~145 d,每年只生产1季水稻,因此,黑龙江省寒地水稻种植的灌溉策略不同于常规的灌溉管理。充分考虑稻田的气象因素及寒地水稻特殊的生长周期,结合灌溉制度影响因子与寒地水稻生理特征,构建适合寒地水稻生长环境的灌溉管理模型,达到适时适量灌溉[21]。表1为寒地水稻各生育期耗水量的调查统计结果。
表1 寒地水稻耗水量 mm

由表1可知,寒地水稻各生育期灌溉耗水量不同,说明达到高产必须结合水稻不同生育期需水量进行调亏灌溉;蒸散量是主要的耗水因子。
蒸散量是指水稻叶面蒸腾量和棵间土壤水分蒸发量的总和,采用参考作物冠层蒸散量结合作物系数及水分修正系数法进行计算,其计算式为:
式中:ET为实际作物蒸散量(mm);Kc为作物系数;Ks为土壤水分修正系数;ET0为作物参考蒸散量(mm)。ET0通常使用联合国粮农组织(FAO)推荐的Penman-Monteith(PM)公式[22-23]计算。
Hargreaves等[24]在1985年建立了Hargreaves公式,即H氏公式,该公式只需要知道日平均最高气温和最低气温以及太阳辐射就可以计算参照作物需水量。H氏公式为:
式中:ET0H为H氏公式计算的作物蒸散量(mm);Ra为太阳辐射(MJ/(m2·d));T为2 m高处平均气温(℃);△T为日最高气温与日最低气温差值(℃),△T=Tmax—Tmin;m为温度指数。
王新华等[25]试验结果表明利用H氏公式计算的蒸散量都非常接近PM公式的计算结果,又因为PM公式所需的参量较多,需要结合相应的历史天气数据,计算复杂,故选用H氏公式计算蒸散量。通常,FAO建议C、a、m分别取0.0023、17.8、0.5[26-27],但在不同区域存在差异。根据建三江农场采集的ET数据和相关环境因子,运用回归分析方法,确定了H氏公式的修正系数[27-29],其中C=0.0008、a=37.9、m=0.74。
2 灰色神经网络作物需水量预测
2.1 灰色神经网络输入量选取
合理、正确地选取灌溉制度影响因子是准确、快速预测寒地水稻灌溉需水量的基础,而与水稻灌溉需水量相关的因子种类繁多。寒地水稻灌溉是一种调亏灌溉,突破了稻田水层管理的传统观念,不再以灌溉水层作为灌溉的控制指标,而是以水稻不同生育期不同的根系土壤含水率作为指标,也就是以土壤含水率是否达到控制标准判断灌溉及灌水量。传统灌溉属于充分灌溉,长时间保留田间水层,保证充足供水,而智能灌溉实行人为调亏,根据水稻不同生育期的不同需水量和生理特性,在需水非敏感期实施人为胁迫,适当减少水分供应,可以有效地控制水稻叶面蒸腾和土壤水分蒸发,在需水敏感期保证供水,因此,智能节水控制灌溉技术不需要长时间建立水层,有利于减少渗透量,提高水肥利用率。兹将灌溉制度中的田间水位当作一种非主要的灌溉影响因子,没有将其作为灰色神经网络的输入,而是以土壤湿度作为稻田含水率的控制标准。
蒸散量包括作物蒸腾量和田间蒸发量。由表1可知,蒸散量是水稻灌溉过程中主要的耗水因子,其计算值涵盖了多种稻田环境气候因子和土壤特性、作物生长特性,很大程度反映了灌溉需求;温度升高,水稻叶面温度也会升高,从而提高了水稻的蒸腾速率,而且,温度升高,田间水分蒸发也会增加,反之则减缓;风速越大,水稻叶面蒸腾作用就会加快;日照时间越长,太阳对稻田的辐射能量越多,植物光合作用越强,水稻蒸腾和土壤水分蒸发量越高,因此,兹提出的灌溉制度包含了多种影响因子,需要建立一阶N维灰色动态模型GM(1,N)。
2.2 模型构建
寒地水稻灌溉需水量由作物发育期生长状态和稻田环境气象参数决定,主要考虑外部影响因子。在充分考虑了环境气象数据及ET对每个气象要素敏感性的基础上,将温度、作物蒸散量、风速、日照时间、土壤湿度这5个影响因子作为灰色神经网络的输入,输出为预测作物灌溉需水量。具体建模步骤为:
1)模型定义算法
在GM模型中对数据序列进行一次累加,使处理后的数据具有相应规律,接着用典型的曲线拟合。设x(0)为时间数据序列,则有:
x(0)进行一次累加得到数据序列x(1),序列的第t项是时间数据序列x(0)的前t项和,如:
根据数据序列x(1),构成白化方程:
式中:a称为发展系数;u为灰色作用量。可用最小二乘法求得a和u:
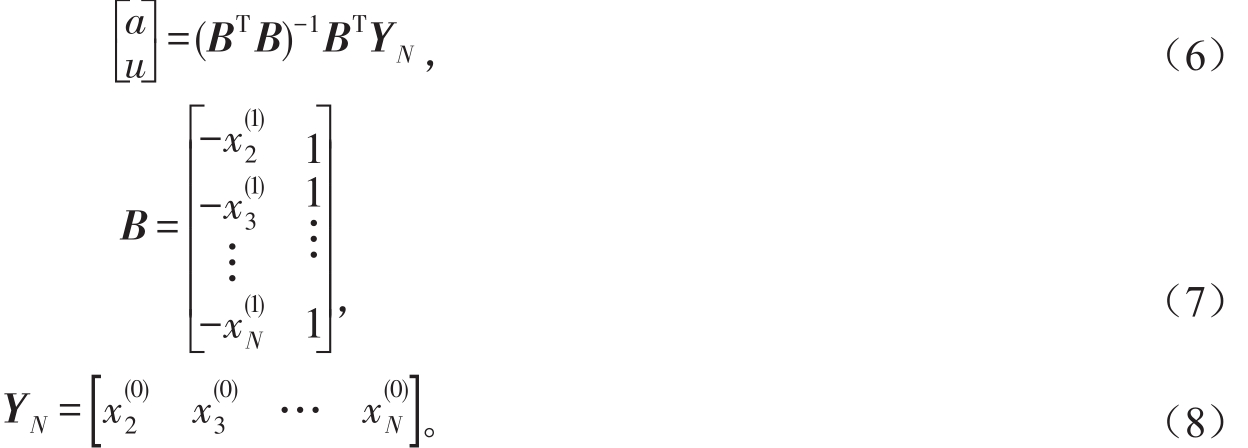
一般取a=0.5。
式(5)的解为:
 为
为 序列的估算值,对
序列的估算值,对 进行一次累减即可获得x(0)的预测值
进行一次累减即可获得x(0)的预测值 。
。 计算式为:
计算式为:
综上可得,数据序列 经过一次累加得到序列
经过一次累加得到序列 ,表现出指数增加规律。因此,可以用一个连续函数或微分方程实现数据拟合和相关预测。
,表现出指数增加规律。因此,可以用一个连续函数或微分方程实现数据拟合和相关预测。
2)定义算法中的数列
设数列 表示为xn(t),t为网络样本数据组的编号,t=1,2,…,N;n是样本数据组中某一组的编号,n=1,2,…,6;x1(t),x2(t),…,x6(t)分别为预测作物需水量、温度、作物蒸散量、风速、日照时间、土壤湿度。把经过一次累加生成的数据序列
表示为xn(t),t为网络样本数据组的编号,t=1,2,…,N;n是样本数据组中某一组的编号,n=1,2,…,6;x1(t),x2(t),…,x6(t)分别为预测作物需水量、温度、作物蒸散量、风速、日照时间、土壤湿度。把经过一次累加生成的数据序列 记为yn(t),预测结果
记为yn(t),预测结果 记为z(t)。
记为z(t)。
3)微分方程
式中:y1(t)、y2(t)、…、y6(t)分别为经过一次累加的预测作物需水量、温度、作物蒸散量、风速、日照时间、土壤湿度数据序列;a、b1、b2、…、b6为微分方程系数。式(11)的时间响应为:
4)建立神经网络拓扑结构
在式(12)中替换d,可得![]()
经变换可得:
将式(14)映射到一个拓展的BP神经网络中可得到灰色神经网络拓扑结构,如图4所示。图中t为样本数据组编号;yn(t)为网络输入参数,分别为y2(t)、y3(t)、…、y6(t);w11、w21、w22、…、w25、w31、w32、…、w35为连接权系数;y1(t)为网络预测值。
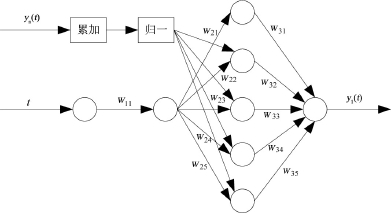
图4 灰色神经网络拓扑结构图
2.3 输入数据处理
统计2010―2015年5―8月建三江农场的水稻灌溉需水量和气象数据,如表2所示,表中温度、风速为每月的平均值;土壤湿度为最佳湿度范围;日照时间、降雨量、需水量和作物蒸散量为每月的总和。
表22010 ―2015年作物需水量和气象数据
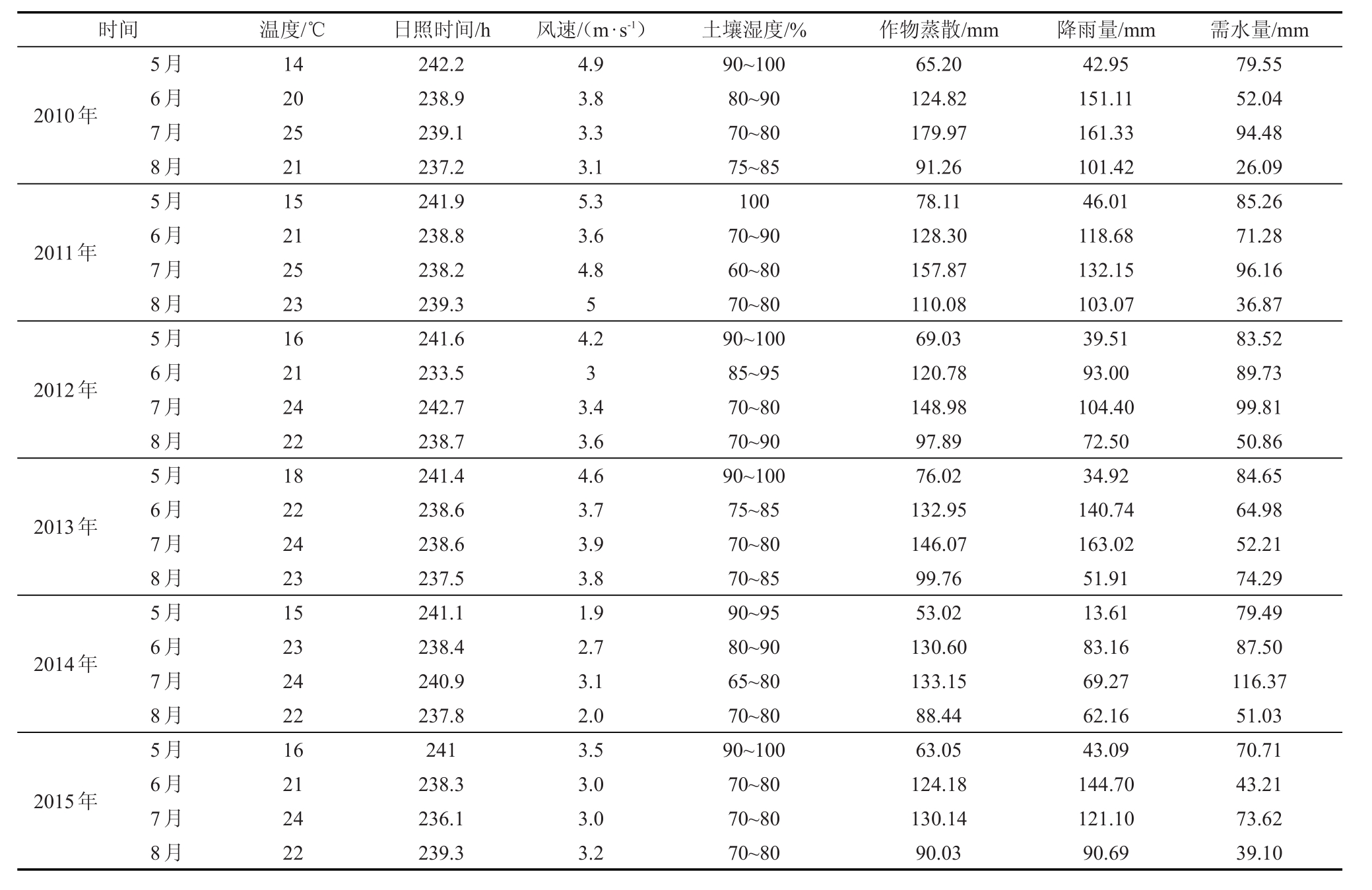
表2包含了2010—2015年24组数据,将2010―2013年的16组数据作为训练数据,用2014―2015年的8组数据判断和评估网络的预测性能。
3 模糊控制器设计
3.1 输入/输出变量模糊划分及隶属度函数
本灌溉制度设计的模糊控制器是一个双输入-单输出的控制系统,输入量为灰色神经预测网络预测的作物需水量与最佳需水量的差值e及其变化率ec,输出量为灌溉时间长度u。稻田灌溉量受多种环境因素影响,因此,预测作物灌水量和作物最佳灌水量的差值与差值变化率是稻田环境气候与作物叶面分布的综合反映。差值是一个离散的结果,反映了预测作物需水量和作物最佳需水量的差别,不同的差值对应不同的灌溉操作,差值的理想值为0,这样系统预测的灌溉量就是水稻生长发育的最佳灌溉需水量;差值变化率反映了二者差值的变化速度,也就是反映了差值的变化趋势。只有综合考虑二者作为模糊控制器的输入,才能有效地抑制偏差,进而使灌溉量更接近于最佳灌溉量,从而确定灌溉时间。图5为模糊灌溉控制器原理图,图中ke、kec、ku为量化因子;E、EC、U分别为e、ec、u对应的模糊变量。
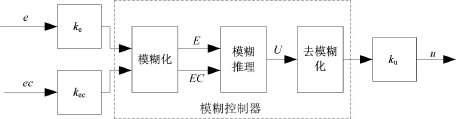
图5 模糊控制器原理图
根据试验论证,三角形隶属函数(membership function,MF)形式简单且计算效率高[14,30],故本灌溉制度选择三角形MF。差值的范围为-2~1 mm,故e的基本论域为[-2,1],量化因子ke取为1.33;差值变化率为-0.2~0.2,故ec的论域为[-0.2,0.2],kec取值为10,各取5个模糊子集{NB,NS,0,PS,PB};试验田面积为80 m2,采用的水泵流量为32.3 m3/h,最大灌溉时间为土壤湿度从40%变化到100%时所需要的时间,由试验检测得所需时间为30 min,则输出变量u的论域为[0,30],量化因子ku取0.133,模糊子集选为{VL,L,M,H,VH}。NB、NS、O、PS、PB、VL、L、M、H、VH为输入输出模糊集合语言变量。输入输出量隶属函数如图6所示。

图6 E、EC、U的隶属函数
3.2 模糊决策及模糊规则表
模糊决策采用Mamdani型,去模糊化选用面积中心(重心)法。根据水稻专家经验和实际种植经验,当差值很大且变化率很大时,灌溉时间最短;当差值适中且变化率不明显时,灌溉时间维持原状,因此采用模糊条件推理“ifAand B then C”得出模糊控制规则表(表3)。
表3 模糊控制规则表

注 NB(负大),NS(负小),O(零),PS(正小),PB(正大),VL(很小),L(小),M(中),H(大),VH(很大)为输入输出模糊集合语言变量。
4 系统应用与分析
4.1 计算机仿真
为了验证本灌溉制度的优越性,运用MATLAB软件对灌溉控制算法和传统控制算法进行仿真对比试验,响应结果如图7所示。
从图7可以看出,模糊控制的超调量为8.75%,传统控制的超调量为32.5%;模糊控制的上升时间为0.6 s,传统控制的上升时间为0.9 s。因此,智能灌溉制度响应速度快,超调量小,控制性好。
采用MATLAB专用的模糊逻辑工具箱(fuzzy logic toolbox)中的图形用户界面(graphical user interface,GUI)仿真方式,在Mamdani模糊推理编辑器中确定输入/输出量;MF编辑器中确定选用的隶属函数;在规则编辑器中输入表3所示的模糊控制规则,可得到输出量曲面观测窗如图8所示,从仿真图形可以看出控制曲面呈非线性,说明模糊灌溉控制本身也是非线性的。

图7 模糊控制仿真结果

图8 FIS输出量曲面观测窗
4.2 田间试验
为检测本灌溉制度的特性,2016年5―7月别在东北农业大学水稻试验田和黑龙江省建三江农场进行田间现场试验。
1)在东北农业大学水稻试验田选取6块相邻的等面积的水稻种植区,1~3号田采用传统的灌溉管理方式,4~6号田选用兹研究的灌溉制度进行灌溉控制,水稻试验品种为龙稻20,灌溉水源相同,每块稻田土壤渗透特性相似,试验区病虫害防治、施肥管理基本相同,试验期为水稻生长的返青期到分蘖期。试验阶段的水稻灌水量和最终的水稻产量均来自试验基地,试验结果如表4所示。
表4 灌溉用水量及水稻产量

注 试验种植区同位于东北农业大学水稻试验田,且试验期时间相同,稻田的降雨量相同。
由表4可知,智能灌溉较传统灌溉有很好的节水效果,节水率达到了11.59%,并且水稻产量和结实率也有所提高,说明智能灌溉制度不仅保证了水稻产量,也实现了很好的节水效果,符合精细农业的要求。
2)在建三江农场选取6块相邻的等面积稻田,试验前,人为保持6块试验稻田的土壤含水率相同,以垦稻24为试验稻种,灌溉水源相同、稻田地势平坦,且每块试验稻田土壤成分、土壤渗透特性基本相似,病虫害防治、土肥管理基本相同;1~3号稻田采用传统的灌溉管理方式,4~6号稻田安装的微型气象站监测气象数据,采用基于灰色神经网络与模糊控制的灌溉制度,观测期为水稻生长的返青期到分蘖期,表5列出的是试验期内某次灌溉水量。由于试验稻田同位于建三江农场,试验期内降雨量基本相同,因此降水在对比试验中属于同一影响因子,故表中未列出降雨量。
表5 稻田灌溉数据 mm
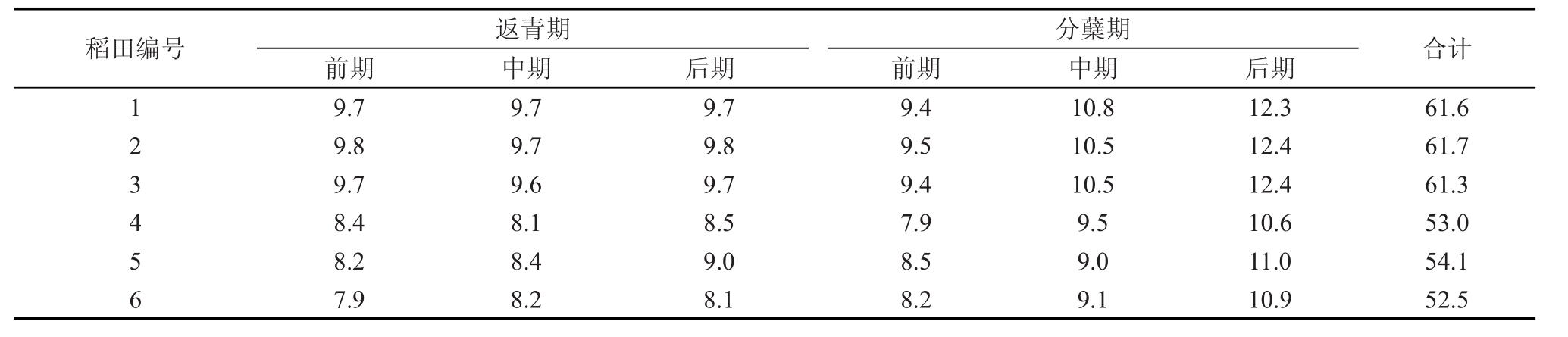
由表5可得,稻田4―稻田6相比稻田1―稻田3灌溉水量明显减少,节水率达到13.54%,说明本灌溉制度比传统灌溉控制具有更好的节水效果。
5 讨论
水分是影响寒地水稻高产的重要因素之一。土壤含水率过高或过低都有可能导致水稻的减产。土壤含水率不仅受灌水的影响,而且受降水等其他因素影响。适当的土壤含水率既保证了水稻的正常水分需求,也有利于促进作物的正常生长,提供充足的物质供给。传统的大水漫灌方式,只是凭经验灌水,保证稻田的水分供给,完全忽略了水稻在各个生育期的最佳需水量,这不仅浪费了水资源也有可能导致水稻的减产。因此,需要根据水稻不同生育期的不同需水量和生理特性进行调亏灌溉,这样不仅保证了水稻的产量和结实率,也提高了灌溉水利用率。前人提出的基于调亏理论和模糊控制的寒地水稻智能灌溉策略中以调亏理论为灌溉基础,根据水稻不同生育期需水量进行人为调亏灌溉,起到了增产节水的效果[8],与本研究结果一致。
匡迎春等[2]、章军富等[4]、郭正琴等[12]设计了不同的灌溉管理系统,这些系统在实现方式上与本研究不同,但都起到了很好的节水效果。本灌溉制度的田间试验只是针对黑龙江省寒地水稻,对于其他水稻种植区不同稻种的灌溉节水效果是否明显,而且本灌溉制度只是单方面起到了节水作用,与上述灌溉管理系统相比是否会提高节水效果有待进一步研究。另外,本研究只是针对寒地水稻单一作物进行灌溉管理试验,对于其他种植作物能否在保证产量的同时实现节水的目的有待进一步试验验证。
6 结论
1)建立了微型气象站监测稻田环境气象数据,降低了数据采集的成本也大大提高了数据的实时性和可靠性,并由灰色神经网络预测模型预测作物灌溉需水量和灌溉制度影响因子,解决了灌溉控制的不确定性和时滞性。
2)以灰色神经网络预测出的灌溉水量与作物最佳灌水量的差值及差值变化率作为模糊控制器的输入,输出灌溉时间长度,解决了灌溉控制的非线性问题,不需要建立精确数学模型,达到适时适量灌溉。
3)MATLAB仿真验证了该灌溉控制制度响应速度快、超调量小、控制性好;在东北农业大学水稻试验田的对比试验结果表明,在保证水稻产量和结实率的同时,智能灌溉的节水率达到了11.59%,在黑龙江省建三江农场田间试验结果表明该灌溉制度与传统控制方式相比,节水率高达13.54%,具有很好的节水效果,并能对作物需水量做出更优判断与管理,对实现精细农业,提高农业用水利用率具有重要意义。
参考文献:
[1]李保国,黄峰.1998—2007年农业用水分析[J].水科学进展,2010(4):575-583.
[2]匡迎春,沈岳,段建南,等.模糊控制在水稻节水自动灌溉中的应用[J].农业工程学报,2011,27(4):18-21.
[3]高俊东.黑龙江省水资源可持续发展的路径选择:关于黑龙江省水资源的现状、问题及发展对策研究[J].黑龙江科技信息,2008(21):130.
[4]章军富,陈峻岐,胡剑非,等.基于GPRS/SMS和μC/OS的都市绿地精准灌溉控制系统[J].农业工程学报,2009,25(9):1-6.
[5]刘广明,杨劲松,姜艳,等.基于控制灌溉理论的水稻优化灌溉制度研究[J].农业工程学报,2005,21(5):29-33.
[6]陈南祥,杨莉,邵玉冰.灰色系统理论在区域干旱程度评价中的应用[J].灌溉排水学报,2007,26(1):26-29.
[7]何自立,马孝义,靳国云,等.基于新陈代谢GM(1,1)-Markov链模型的有效灌溉面积预测[J].灌溉排水学报,2011,30(4):107-110.
[8]张伶鳦,王润涛,张长利,等.基于调亏理论和模糊控制的寒地水稻智能灌溉策略[J].农业工程学报,2016,32(13):52-58.
[9]左燕霞,徐振辞,聂建中,等.基于BP神经网络模型的用水量预测研究[J].灌溉排水学报,2007,26(S1):97-98.
[10] 柳烨,赵文刚,杨佩佩,等.基于温湿度的ET0估算模型应用研究[J].灌溉排水学报,2016,35(2):35-39.
[11]张宏,马岩,李勇,等.基于遗传BP神经网络的核桃破裂功预测模型[J].农业工程学报,2014,30(18):78-84.
[12]郭正琴,王一鸣,杨卫中,等.基于模糊控制的智能灌溉控制系统[J].农机化研究,2006(12):103-105.
[13]杨文君,刘生福.模糊控制自动灌溉系统设计[J].灌溉排水学报,2007,26(4B):154-155.
[14]范杰,王长德,崔巍,等.渠道运行系统中的模糊PID联合控制研究[J].灌溉排水学报,2003,22(4):59-62.
[15]谢家兴,王卫星,陆华忠,等.基于CC2530的荔枝园智能灌溉系统设计[J].灌溉排水学报,2014,33(4/5):189-194.
[16]马从国,赵德安,王建国,等.基于无线传感器网络的水产养殖池塘溶解氧智能监控系统[J].农业工程学报,2015,31(7):193-200.
[17] 丁力,宋志平,徐萌萌,等.基于STM32的嵌入式测控系统设计[J].中南大学学报(自然科学版),2013,44(增1):260-265.
[18]丁凡,周永明.基于STM32和ZigBee的无线校园火灾报警系统设计[J].微型机与应用,2012,31(6):43-45.
[19]胡培金,江挺,赵燕东.基于zigbee无线网络的土壤墒情监控系统[J].农业工程学报,2011,27(4):230-234.
[20] 张猛,房俊龙,韩雨.基于ZigBee和Internet的温室群环境远程监控系统设计[J].农业工程学报,2013,29(增1):171-176.
[21]王卫光,孙风朝,彭世彰,等.水稻灌溉需水量对气候变化响应的模拟[J].农业工程学报,2013,29(14):90-98.
[22]苏春宏,陈亚新,王亚东,等.ET0计算模型及其主要输入因子的影响分析评估[J].灌溉排水学报,2006,25(1):14-19.
[23] 徐俊增,彭世彰,张行男,等.两种Penman-Monteith公式计算草坪草参考蒸发量的适用性[J].农业工程学报,2009,25(12):32-37.
[24]HARGREAVES G H,SAMNI ZA.Reference crop evapotranspiration from temperature[J].Applied Engineering inAgriculture,1985(2):96-99.
[25]王新华,郭美华,徐中民.分别利用Hargreaves和PM公式计算西北干旱区ET0的比较[J].农业工程学报,2006,22(10):21-25.
[26] 唐晓培,宋妮,陶国通,等.黄淮海地区Hargreaves公式主要参数的空间化处理[J].农业工程学报,2016,32(增1):63-70.
[27]王斌,付强,王敏,等.不同时间步长的Hargreaves公式修正式适用性研究[J].东北农业大学学报,2011,42(8):131-135.
[28]王斌,付强,张金萍,等.Hargreaves公式的改进及其在高寒地区的应用[J].灌溉排水学报,2011,30(3):82-85.
[29]赵永,蔡焕杰,王健,等..Hargreaves计算参考作物蒸发蒸腾量公式经验系数的确定[J].干旱地区农业研究,2004,22(4):43-47.
[30]谢守勇,李锡文,杨叔子,等.基于PLC的模糊控制灌溉系统的研制[J].农业工程学报,2007,23(6):208-210.